Pipeline
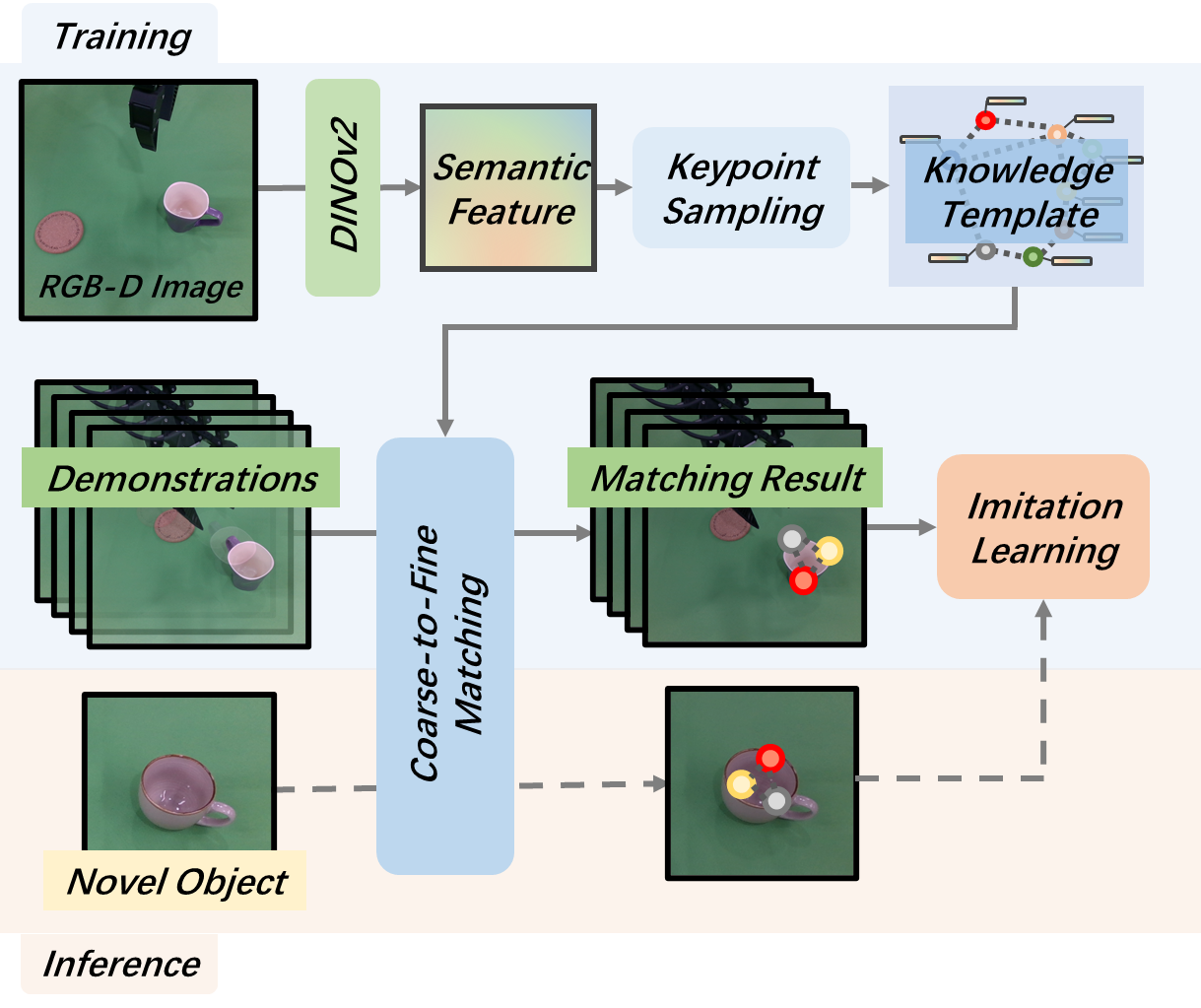
Given an RGB-D image as input, the system generates a knowledge template for a specific object. This template is then matched to the demonstration, and the policy is learned based on the matching results. When encountering novel objects, the learned policy can be transferred, enabling generalization to new scenarios.